MLP
Why introduce nonlinearty:
Suppose

There is absolutely no fucking point of using H because it’s still a  all along, and it’s equivalent to only one layer
all along, and it’s equivalent to only one layer
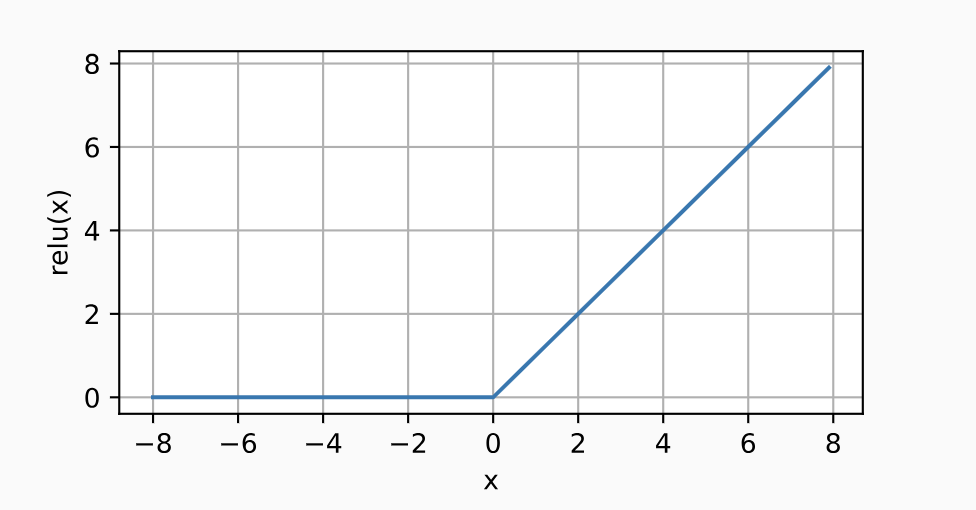
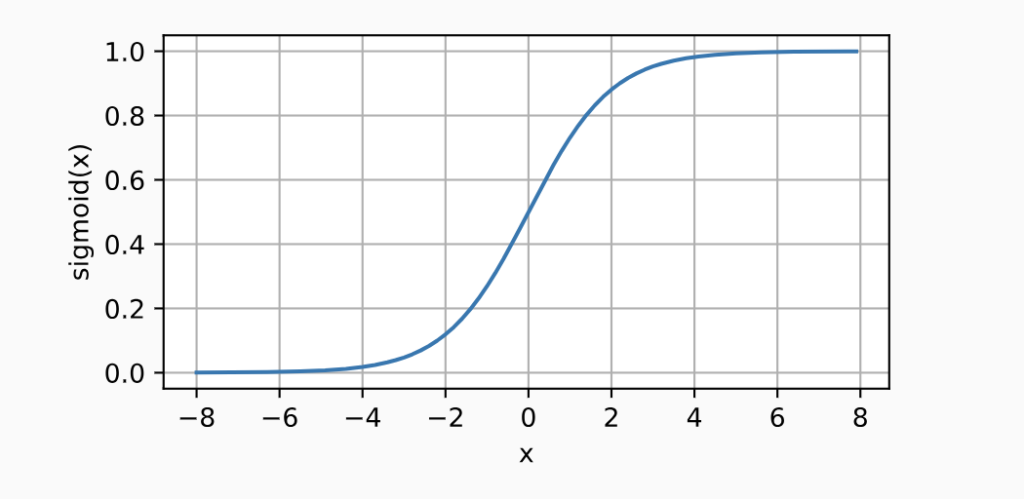
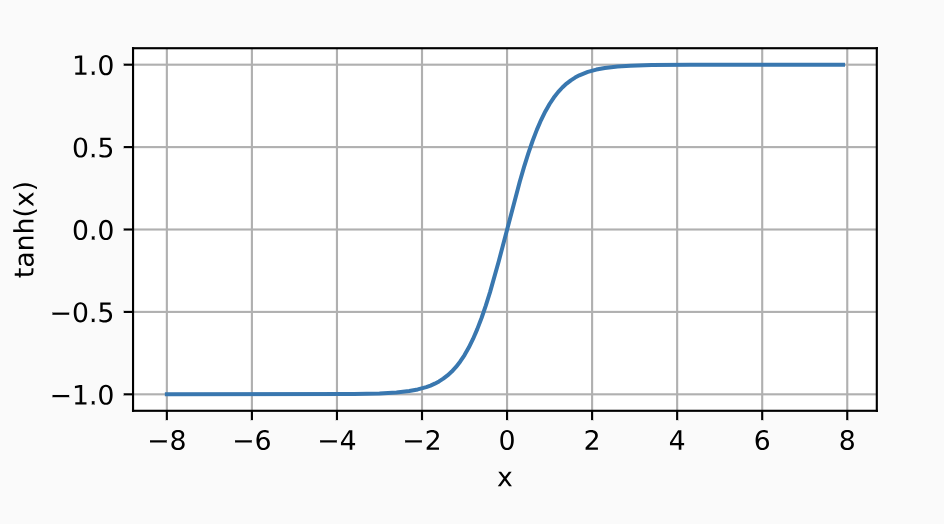
So a nonlinearty thing is introduced by applying a nonlinear function to H:

Where  can be:
can be:
- torch.relu(x)
- torch.sigmoid(x)
- torch.tanh(x)
Implementation example:
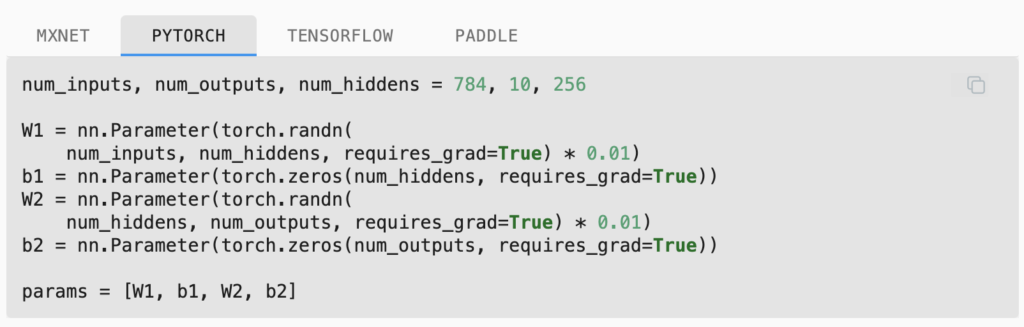

OR:
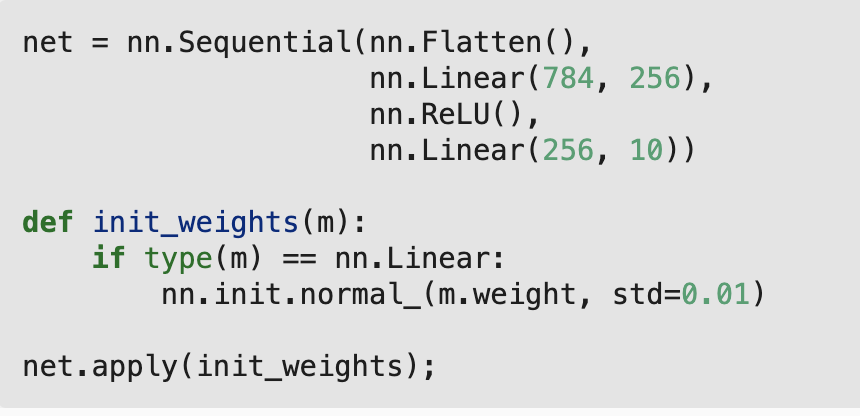
Other elements are exactly the same as softmax implemenation
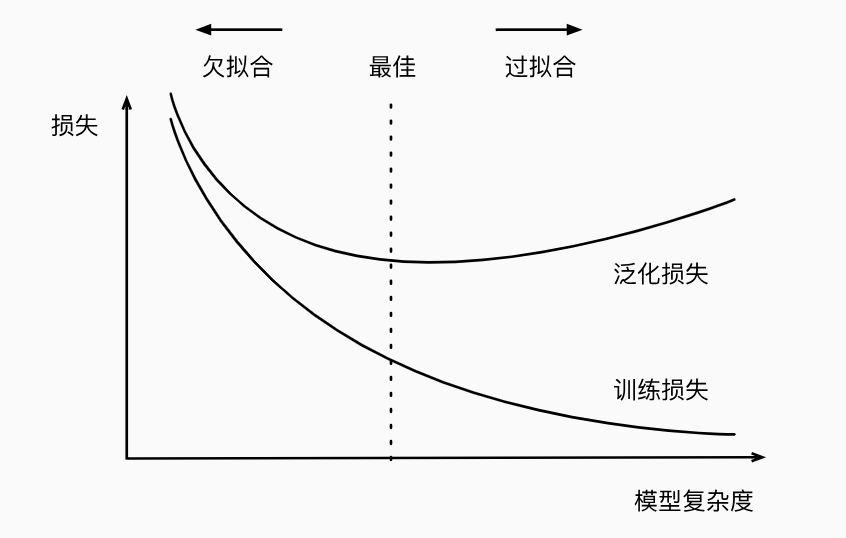
Model selection
- Fitting, Underfitting, Overfitting: Using way too much parameters and causing a model to become overfit to the training data is like using extra efforts to try to remember the whole textbook but fail to answer new questions in exam
- Training vs Generalization
- Training set + Validation set = Training process
- Test set = Testing process
Weight decay
Literally R2 Regularization, after which:

and gradient is updated using

Implemented as:
wd = lambda_to_be_used_that_specifies_penalty_level
trainer = torch.optim.SGD(
[{"params": net[0].weight, "weight_decay}: wd"}],
...
)
...
for i in range(epoch_num):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backword()
trainer.step()
...
...
...Dropout
Forward & Backward propagation
Gradient vanishing & exploding
Gradient vanishing: in the chain, if only one chain’s gradient is zero or very small, the whole gradient chain will be very small because of it. Solution is to use ReLU
Gradient exploding: no convergence in optimizer
Initialization
Special initialization methods are used to solve the problem of symmetry, which means that if we initialize weights using the same value, model cannot distinguish different nodes, and the model cannot use its full computational power. Special methods include initializing weights using normal distriburion and Xavier initialization
Example: house price prediction
Data downloading & preprocessing: omitted
Define data input
all_features is the cleaned dataframe, n_train in the number of training rows to be used
().values enables the program to access the NumPy array
reshape(-1, 1): for the final reshaped train_labels, row is not specified (-1), col must be 1 (1).
train_features = torch.tensor(all_features[:n_train].values,dtype=torch.float32)
test_features = torch.tensor(all_features[n_train:].values,dtype=torch.float32)
train_labels = torch.tensor(
train_data.SalePrice.values.reshape(-1, 1), dtype=torch.float32)Definition of loss and net
what is the loss that MODEL USES is following standards.
What is the loss that WE USES is exactly calculated is defined by our own. Here we define loss as RMSE of logarithm value btwn actual and pred:

clamp() is used to make everything in pred under 1 to be 1, for convenience of taking logarithm of it later
loss = nn.MSELoss()
def log_rmse(net, features, labels):
clipped_preds = torch.clamp(net(features), 1, float('inf'))
rmse_loss = torch.sqrt(loss(torch.log(clipped_preds), torch.log(labels)))
return rmse.item()in_features = train_features.shape[1]
def get_net():
return nn.Sequential(nn.Linear(in_features,1))Definition of train process
in each epoch, for each batch:
- reset the gradient of trainer to be 0
- feed X through net, calculate the training loss by using y
- back propagate the loss
- update the params
After each epoch, report the RMSE loss
Then begin next epoch by feeding each batch of training data again, repeat until an epoch number is reached
def train(net, train_features, train_labels, test_features, test_labels, num_epochs, learning_rate, weight_decay, batch_size):
train_ls, test_ls = [], []
train_iter = d2l.load_array((train_features, train_labels), batch_size)
optimizer = torch.optim.Adam(net.parameters(),
lr = learning_rate,
weight_decay = weight_decay)
for epoch in range(num_epochs):
for X, y in train_iter:
optimizer.zero_grad()
l = loss(net(X), y)
l.backward()
optimizer.step()
train_ls.append(log_rmse(net, train_features, train_labels))
if test_labels is not None:
test_ls.append(log_rmse(net, test_features, test_labels))
return train_ls, test_lsUse the model
Get the final training loss and get predictions on test data
net = get_net()
train_ls, _ = train(net, train_features, train_labels, None, None, num_epochs, lr, weight_decay, batch_size)
print(f'final log rmse:{float(train_ls[-1]):f}')
preds = net(test_features).detach().numpy()Misc
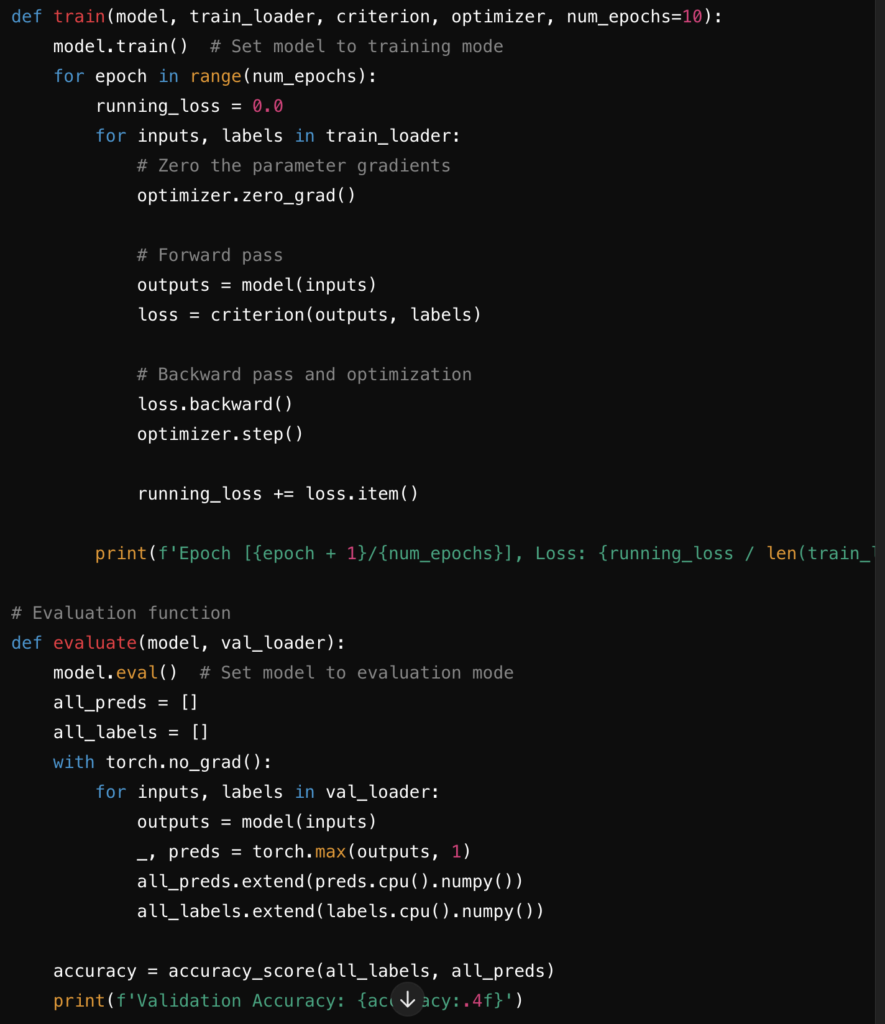
Setting the model to train / eval mode ensures the dropput and batchnorm layer function correctly, and other capability benefits. (Training mode will activate dropout, eval mode will disable dropout, things like this)
Each parameter’s gradients are calculated when updating the model from loss, calculated by partial derivative shits. The model prepares to calculate grad, unless no_grad is called, that’s why it is called in evaluation phase because in evaluation phase grads are not used
Parameters are updated using that gradient and learning rate when step() is called
After one batch of data completes its life cycle in the model, gradients need to be cleared to enable the model to learn from next batch, it is done using zero_grad
Comments are closed